Accurate point-wise velocity estimation in 3D is vital for enabling robot interaction with non-rigid dynamic agents such as humans, enabling robust performance in path planning, collision avoidance, and object manipulation in dynamic settings. To this end, we propose a novel RADAR, LiDAR, and camera fusion pipeline for point-wise 3D velocity estimation named CaRLi-V. This pipeline leverages a novel RADAR representation, the velocity cube, which densely represents radial velocities within the RADAR's field-of-view. By combining the velocity cube for radial velocity extraction, optical flow for tangential velocity estimation, and LiDAR for dense point-wise localization measurements through a closed-form formulation, our approach can produce detailed velocity measurements for a dense array of points. This repository comprises of a ROS2 package for 3D dense point-wise velocity estimation using a camera, RADAR, and LiDAR fusion framework.
 The pipeline is divided into three steps: RADAR pre-processing, where raw ADC RADAR data is used to compute the RADAR velocity cube, a dense representation of velocities in the environment; Camera pre-processing, where two consecutive camera images are used to compute optical flow vectors for each pixel in the image; Sensor fusion, where the LiDAR point cloud is projected into both representations to extract radial velocity and optical flow readings, with both estimates combined through a closed-form solution.
The pipeline is divided into three steps: RADAR pre-processing, where raw ADC RADAR data is used to compute the RADAR velocity cube, a dense representation of velocities in the environment; Camera pre-processing, where two consecutive camera images are used to compute optical flow vectors for each pixel in the image; Sensor fusion, where the LiDAR point cloud is projected into both representations to extract radial velocity and optical flow readings, with both estimates combined through a closed-form solution.
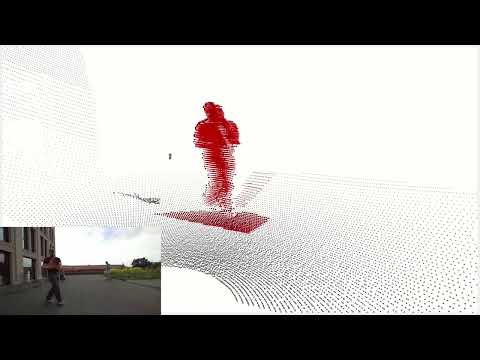
 The pipeline is able to (a) discern velocities between different dynamic agents; (b) estimate both radial and tangential velocities, as well as combinations of both, and (c, d) extract velocities from single parts of non-rigid moving agents, such as individual limbs in humans.
The pipeline is able to (a) discern velocities between different dynamic agents; (b) estimate both radial and tangential velocities, as well as combinations of both, and (c, d) extract velocities from single parts of non-rigid moving agents, such as individual limbs in humans.
See a demonstration of our pipeline in action by clicking on the image below:
This repository was built on Ubuntu 22.04 for ROS2 Humble. To install the necessary packages to run the ROS nodes:
cd ros
pip install -r src/carli_v/requirements.txt
Then build using colcon:
colcon build --symlink-install
source install/setup.bash
Several launch files exist to facilitate the running of the pipeline.
To run the full pipeline:
ros2 launch carli_v radar_full_velocity.launch.py
To run only the radar-lidar fusion node (for radial velocities only):
ros2 launch carli_v radar_mode.launch.py
We developed the ROS node using usage with our own sensor rig consisting of a Zed 2i Camera, HESAI QT128 LiDAR, and V-MD3 RADAR.
 If running on live data, the nodes expect LiDAR messages to be broadcast on the topic
If running on live data, the nodes expect LiDAR messages to be broadcast on the topic /hesai_lidar as a PointCloud2 topic, RADAR ADC data to be broadcast as an Image on /radar_ADC, and image data in /camera/image_raw. Modifications will have to be made for running with other sensors. Otherwise, see Testing for testing with an annotated dataset.
To reproduce the test results in our paper, download our annotated ground-truth dataset into the folder /datasets under this repository (public link will be provided later, for now on request only). You will need to download the rosbag of sensor data seperately as well.
Steps for using a custom ground-truth dataset
If using a custom dataset with our eval script, it should be in [Supervisely format](https://docs.supervisely.com/import-and-export/import/supported-annotation-formats/pointclouds/supervisely). Place the dataset under the folder `/datasets`, The eval script will analyze objects with the name `Person` or `Reflector` in Scene 1You can then export the raw pointclouds from our ROS node implementation as follows:
ros2 launch carli_v radar_full_velocity.launch.py save_pcd_as:=scene_1
This will save the output of the pipeline as a PCD file every time a new output is published.
Then install and run the eval script:
pip install -r eval/requirements.txt
python3 eval/analysis.py