{kind=link}
{kind=link}
{kind=link}
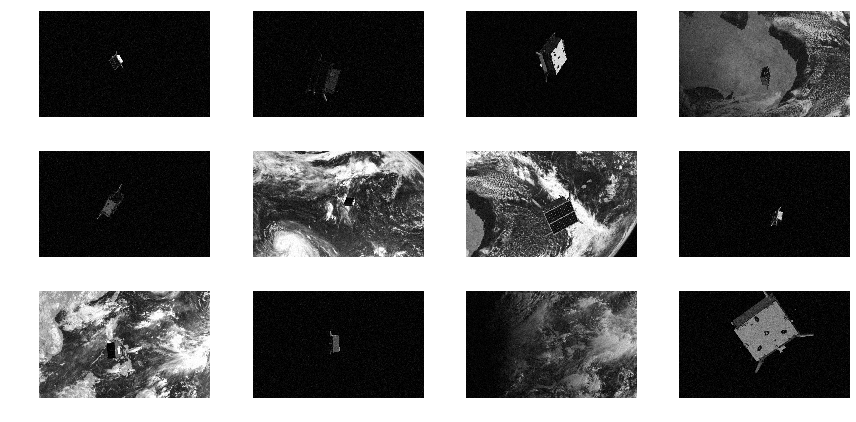
Pose estimation of known uncooperative spacecraft plays an important role in various satellite servicing missions of scientific, economic, and societal benefits. In this work, we aim to estimate the pose, i.e., the relative position and altitude, of a known spacecraft from individual grayscale images using deep neural networks. Convolutional neural networks have been widely exploited for image processing tasks such as object detection, classification, human pose estimation and action recognition.
Dataset Competition Website - https://kelvins.esa.int/satellite-pose-estimation-challenge/home/
- Download the data from : https://kelvins.esa.int/satellite-pose-estimation-challenge/data/
 The downloaded zip file contains dataset in images/ folder.
train/: a folder containing 12000 synthetic images for training. Images are 8 bit monochrome in jpeg format, with a resolution of 1920×1200 pixels.
test/: 2998 similar synthetic images for evaluating submissions
real_test/: 300 real images of the Tango satellite mock-up, same format and resolution as the synthetic images.
real/: 5 example real images, with pose labels
train.json: filenames and corresponding pose labels for the 12000 training images
test.json: list of filenames of the test images
real_test.json: list of filenames of the real test images
real.json: filenames and corresponding pose labels for five example real image
The downloaded zip file contains dataset in images/ folder.
train/: a folder containing 12000 synthetic images for training. Images are 8 bit monochrome in jpeg format, with a resolution of 1920×1200 pixels.
test/: 2998 similar synthetic images for evaluating submissions
real_test/: 300 real images of the Tango satellite mock-up, same format and resolution as the synthetic images.
real/: 5 example real images, with pose labels
train.json: filenames and corresponding pose labels for the 12000 training images
test.json: list of filenames of the test images
real_test.json: list of filenames of the real test images
real.json: filenames and corresponding pose labels for five example real image - Extract to current folder where scripts are : as ./speed folder.
pip install numpy pillow matplotlib
pip install torch torchvision
pip install tensorflow-gpu
pip install jupyter
python [path to python file] --dataset [path to downloaded dataset] --epochs [num epochs] --batch [batch size]
As the training is finished, the model is evaluated on all images of the training and real_training sets, and a CSV file is generated that can be directly submitted on the competition page.
- a) Run poseloss_new_arch.py with default command line arguments. Specify path to where data is otherwise.
- b) Run linear_weighted_loss model :
