![]()
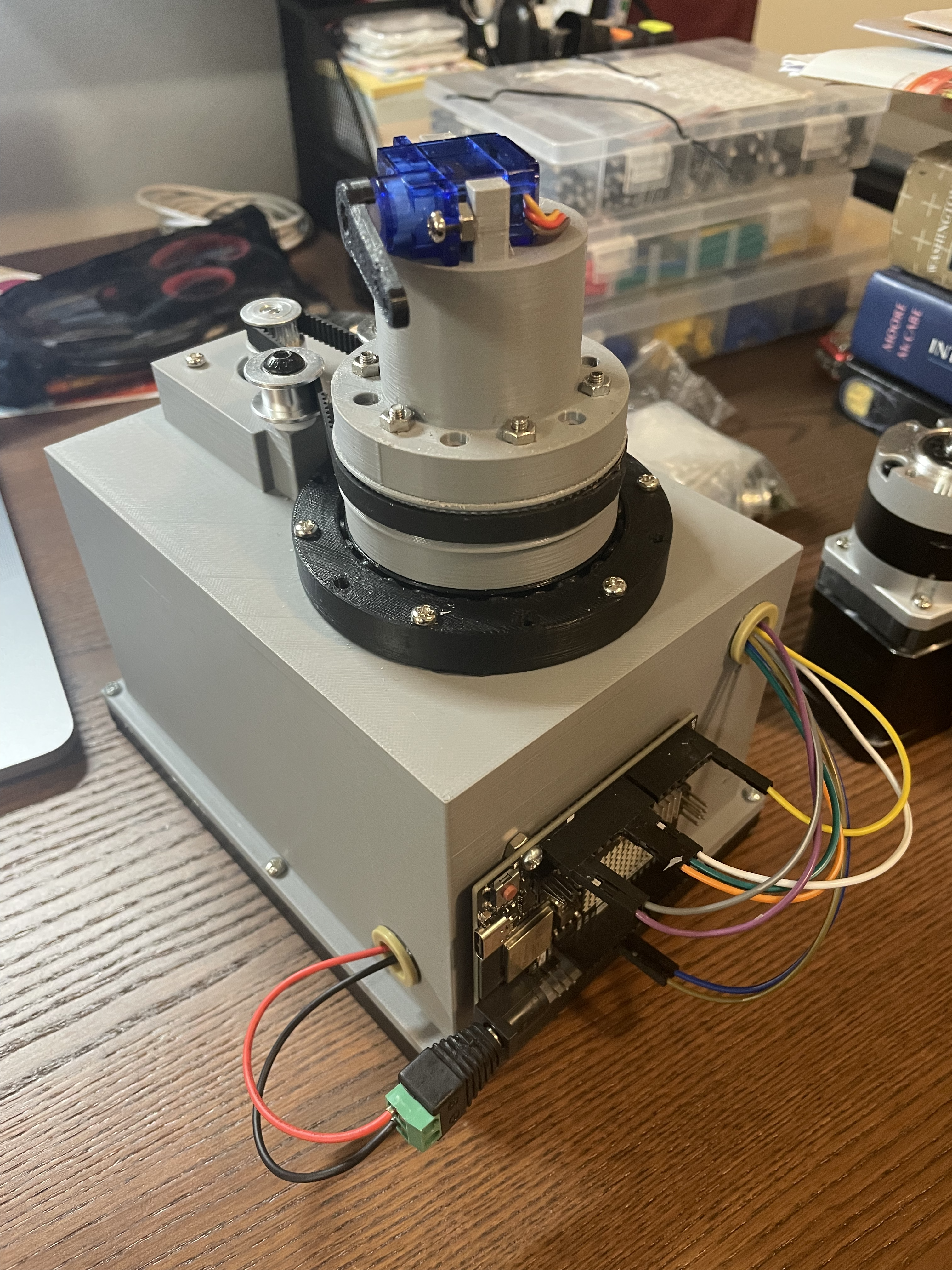
Arduino implementation of an ISS tracker
Print all files in stl_files folder, use Nylon for the bearing (Race Inner Bottom, Race Inner Top, Race Outer, Rolls) at a high infill, and PLA for everything else at 15% infill.
![]()
| Part | Cost (AUD) |
|---|---|
| Ardino uno R4 WiFi | $50 |
| Nema 17 stepper motor | $25 |
| SG90 servo motor | $12 |
| TMC2209 stepper motor driver | $15 |
| 230V AC -> 12V DC power supply | $40 |
| 12V DC -> 9V DC voltage regulator | $10 |
| GY-271 QMC5883 magnometer | $5 |
| 12 wire 5A slip ring 22mm | $30 |
| 15 AWG wire | $5 |
| 20 AWG wire | $15 |
| Dupont jumper wires | $20 |
| 16x2 LCD + i2c Backpack | $10 |
| 1kg Nylon filament | $60 |
| 1kg PLA filament | $20 |
| ATGM336H GPS | $20 |
| Solder breadboard | $15 |
| 3 pin rocker power switch | $10 |
| M3 nuts + screws | $10 |
| PTFE grease | $10 |
| Solder | $5 |
| Heat shrink | $5 |
| Electrical tape | $5 |
| 1m GT2 pulley belt | $10 |
| Superglue | $1 |
| 2.1mm DC barrel jack | $2 |
| Contact Cement | $10 |
| 100 uF capacitor | $2 |
Total cost: ≈ $400
- Anycubic Kobra S1 3D printer
- TS80 soldering iron
- Phillips head screwdriver
- Precision knife

Inspired by Grady Hillhouse's ISS tracking pointer, as seen on Youtube.
Can't open the project? Open it in VS-Code and install the svnty.vscode-arduino-intellisense VS-Code extension.
Device uses 12W (aprox 0.23A).
- Add 3S LiPo support?